
Laura
SAINI
-
Bâtiment ISTV2
Bureau B 0-5
Le domaine de la Conception Géométrique Assistée par Ordinateur (CGAO) se base sur l’étude de la modélisation géométrique. La thématique que j'aborde est la modélisation de courbes, qu’il s’agisse de l’utilisation de types actuels ou du développement de nouvelles approches.
Dans ce contexte le sujet étudié est la modélisation de trajectoires dans l'animation 3D.
L'objectif est modéliser le mouvement d’une caméra réelle car depuis leur apparition, les logiciels de 3D ont toujours tenté de produire des images photoréalistes. Néanmoins il n’existe pas d’outils spécifiques pour réaliser des mouvements de caméra réalistes et la comparaison avec des mouvements de caméra réels montre que les outils actuels ne sont pas optimaux.
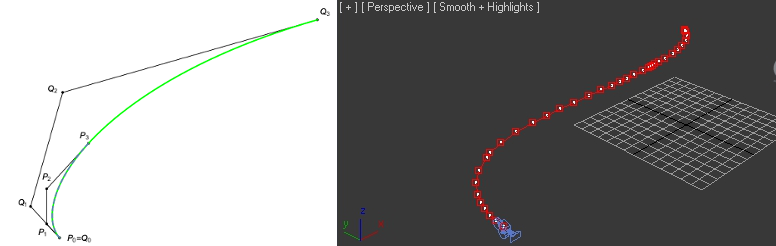
En particulier, afin d’imiter au mieux le comportement du matériel de prise de vue cinématographique réel, je travaille sur une nouvelle classe des courbes, construite sur un espace algébrique-trigonométrique nommée ATPH (Algebraic-Trigonometric Pythagorean-Hodograph). Cette représentation permet en outre de modifier la forme de la courbe en utilisant un paramètre de forme et de reproduire des arcs de courbes trigonométriques planes, tels que cercles, cardioïdes, deltoïdes, limaçons, lemniscates, piriformes.
Nous voudrions donc définir les développements nécessaires à la production de mouvements de caméra réalistes et utiliser cette classe de courbes pour contrôler la courbure ainsi que d’autres contraintes liées au matériel cinématographique réel (Louma, grue, dolly, etc.), et en particulier l’accélération, la vitesse et le bruit.
Ce système permet d’une part de faciliter le travail de l’animateur/trice, et d’autre part ouvre un champ de possibilités supplémentaires quant à l’ajout de contraintes ciblées.
Fonctions actuelles
- Chercheur dans l'équipe Modélisation – Simulation – Aléa.Mes activités de recherche se focalisent sur deux thématiques autour de la modélisation des trajectoires :
- Développement et généralisation d'une nouvelle classe de courbes à hodographe pythagorien
- Animation 3D de caméras réalistes
- Membre de l'équipe Modélisation – Simulation – Aléa.
- Enseignant en mathématiques à l'ISEN Lille (Grande École d'Ingénieurs des Métiers du Numérique).
Dans le groupe de recherche
Dans le laboratoire
Autre
Diplômes universitaires
- 2013 : Doctorat en Mathématiques à l'université de Valenciennes (LAMAV)Titre : Nouveaux outils pour l'animation et le design : système d'animation de caméra pour la stop motion, fondée sur une interface haptique et design de courbes par des courbes algébriques-trigonométriques à hodographe pythagorien.
- 2008 : Master 2 en Mathématiques à l'Université de Milano-Bicocca (Italie)
Enseignements actuels
- Ma charge principale d'enseignement est dispensée à l'ISEN Lille (école d'ingénieurs).
J'interviens aussi dans l'enseignement de Mathématiques au département GEII de l'IUT et au Master MOS de Valenciennes.
Enseignements actuels
- Mathématiques et Travaux Pratiques de Mathématiques
- Public : classe préparatoire intégrée, CIR1 cycle informatique et réseaux (première année)
- Contenu du cours : Logique, ensembles, applications, dénombrement, nombres complexes, équations différentielles, intégrales, limites et équivalents, développements limités, arithmétique, matrices, systèmes linéaires, polynômes et fractions rationnelles, espaces vectoriels, fonctions de plusieurs variables, courbes paramétriques.
- Outils : Sagemath, Python
Enseignements actuels
- Introduction à l'infographie
- Public : première année du cycle ingénieur
- Contenu du cours : Courbes paramétriques, courbes de Bézier, courbes B-splines, NURBS
- Outils : Matlab, WebGl
Enseignements actuels
- APM (Atelier de Préparation Mathématiques)
- Public : première année du cycle ingénieur
- Contenu du cours : Révision du programme de Mathématiques des classes préparatoires
Enseignements actuels
- Transformations de Fourier
- Public : première année du cycle ingénieur
- Contenu du cours : Introduction aux signaux, convolution et Dirac, transformée de Laplace, transformée de Fourier
- Outils : Octave, Matlab
Enseignements actuels
- Probabilités
- Public : première année du cycle ingénieur
- Contenu du cours : Variables aléatoires, indépendance, inférence et décision, processus aléatoires.
- Outils : Octave, Matlab
Enseignements actuels
- Mathematical Tools for the Digital Age (Juin 2018)
Cours donné en anglais.- Public : étudiants du premier cycle de tous les domaines scientifiques (European Summer Program)
- Contenu du cours : Mathématiques appliquées : géolocalisation GPS (résolution d'équations linéaires), algorithme PageRank de Google (chaînes de Markov, théorie des graphes), CD audio (théorème de Shannon, correction d'erreur), fichiers MP3 et images JPEG (compression de données), mouvement de la caméra dans l'animation (géométrie projective, splines), sécurisation un site de commerce électronique (cryptographie)
Enseignements actuels
- TP de déformation de maillages
- Public : M2, Master MOS (Modélisation, Optimisation et Sécurité)
- Contenu du cours : Bases de la déformation de maillages, programmation en C++ avec Visual Studio.
Enseignements actuels
- Outils logiciels 1
- Public : Apprentissage et Formation initiale GEII (première année IUT)
- Contenu du cours : Utilisation des logiciels Maple et Mathematica pour le calcul de dérivées, intégrales et équations différentielles.
- Outils : Maple, Mathematica
Enseignements actuels
- Outils logiciels 2
- Public : Apprentissage GEII (deuxième année IUT)
- Contenu du cours : Utilisation des logiciels Maple et Mathematica pour le traitement du signal (développement en série de Fourier et transformée de Fourier).
- Outils : Maple, Mathematica
- I.Cattiaux and L.Saini : Characterization and extensive study of cubic and quintic algebraic trigonometric planar PH curves. Adv. Comput. Math. 46(28):1--28, 2020
- Romani, L., Saini, L., Albrecht, G.: Algebraic-Trigonometric Pythagorean-Hodograph curves and their use for Hermite interpolation. Adv. Comput. Math. 40(5–6), 977–1010, 2014
- L.Saini, N.Lissarrague, G.Albrecht, L.Romani: Animation réaliste d'une caméra pour la stop motion : de la modélisation à la prise de vue. REFIG, Volume 7, Numéro 1, pp. 51–65, 2013
- L.Saini, N.Lissarrague, G.Albrecht, L.Romani: A new system for stop motion camera movements. Animation Practice Process and Production, Vol 2 No 1, Décembre 2012
- L.Saini, N.Lissarrague, G.Albrecht, L.Romani: Un nouveau système pour créer des mouvements de caméra pour la stop motion. Actes de la 25ème Journées de l'Association Française d'Informatique Graphique commune (AFIG), Calais, pp.161-170, 20-22 Novembre 2012.
- L.Saini, N.Lissarrague, G.Albrecht, L.Romani: Un nouveau système pour créer des mouvements de caméra pour la stop motion. Actes de la 13ème édition des Journées du Groupe de Travail en Modélisation Géométrique (GTMG), Strasbourg, pp.111-120, 21-22 Mars 2012.
- L.Saini, N.Lissarrague, G.Albrecht, L.Romani, C. Fünfzig, J-P Bécar: Animation 3D: mouvements de caméra réalistes pour la stop motion. Actès de H2PTM, Hermes Science/Lavoisier, Metz, pp. 137-143, 12-14 Octobre 2011.
- L.Saini, N.Lissarrague, G.Albrecht, L.Romani: Animation 3D : towards a 3D realistic camera movement. Actes de ISEA2011, Istanbul, 14-21 Septembre 2011, http://isea2011.sabanciuniv.edu/paper/stop-motion-animation-towards-realistic-3d-camera-movement-control
- L.Saini, N.Lissarrague, G.Albrecht, L.Romani: Stop-motion animation: from a state of the art to an ideal process. Matapli n°95, pp.37-52, Juin 2011.
- L.Saini, N.Lissarrague, G.Albrecht, L.Romani: Animation 3D: Le problème de mouvement de camera. Actes de la 11ème édition des Journées du Groupe de Travail en Modélisation Géométrique (GTMG)», Dijon, pp.69-76, 31 Mars-1 Avril 2010.